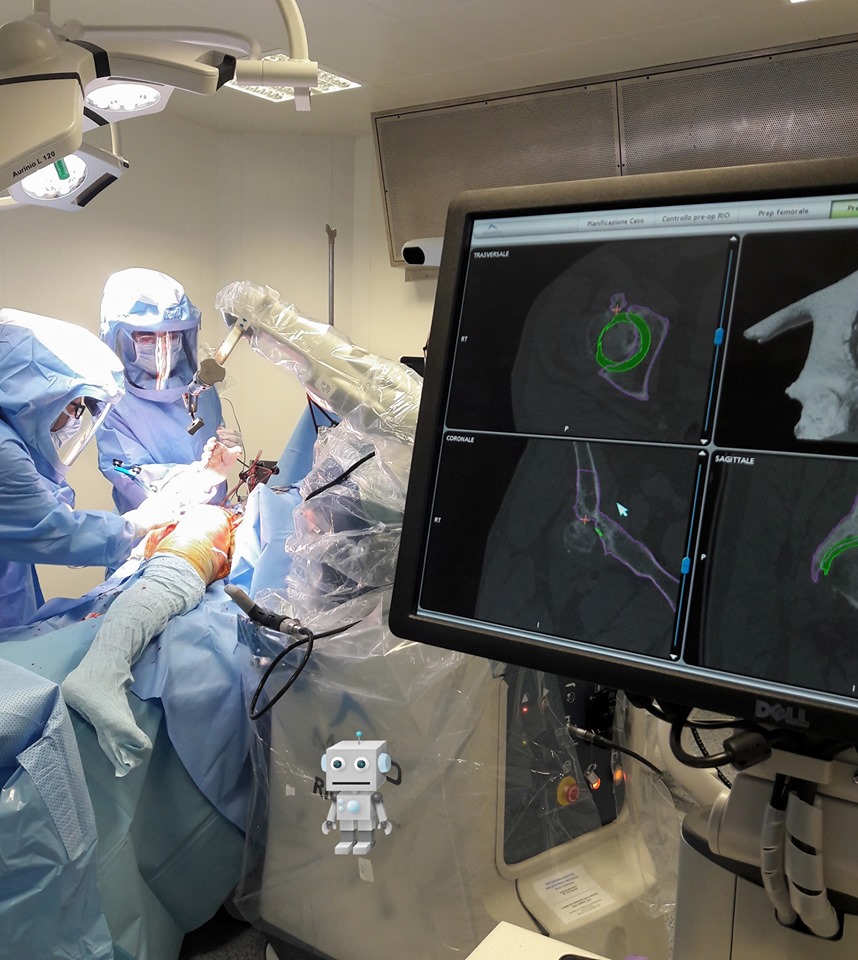
Il sistema ortopedico a braccio interattivo robotico (RIO; MAKO Stryker, Fort Lauderdale, Florida) o Mako-plastica è un sistema aptico disponibile nella pratica clinica per protesi parziali e totali di ginocchio e per protesi totale d’anca. Come un sistema basato su immagine acquisita dal robot, viene utilizzata una TAC preoperatoria in pianificazione chirurgica per aiutare a determinare la dimensione della componente protesica, il posizionamento e la resezione ossea da eseguire che è poi confermato ed adattato preoperatoriamente e/o intraoperatorio in base alle specifica cinematica del paziente prima di qualsiasi resezione chirurgica. Il sistema robotico fornisce feedback tattile durante la procedura, arrestandosi immediatamente qualora la resezione ossea avvenga per errore al di fuori del piano desiderato.
Il sistema ortopedico a braccio interattivo robotico (RIO; MAKO Stryker, Fort Lauderdale, Florida) o Mako-plastica è un sistema aptico disponibile nella pratica clinica per protesi parziali e totali di ginocchio e per protesi totale d’anca. Come un sistema basato su immagine acquisita dal robot, viene utilizzata una TAC preoperatoria in pianificazione chirurgica per aiutare a determinare la dimensione della componente protesica, il posizionamento e la resezione ossea da eseguire che è poi confermato ed adattato preoperatoriamente e/o intraoperatorio in base alle specifica cinematica del paziente prima di qualsiasi resezione chirurgica. Il sistema robotico fornisce feedback tattile durante la procedura, arrestandosi immediatamente qualora la resezione ossea avvenga per errore al di fuori del piano desiderato.
(ROSA Knee Robot, Zimmer Biomet, Varsavia,IN) è stato inizialmente utilizzato in Australia nel 2018 e ha ricevuto l’approvazione da parte della Food e Drug Administration degli Stati Uniti all’inizio del 2019. Il sistema ROSA-Knee Robot non richiede imaging preoperatorio avanzato, come la scansione TC, ma la progettazione della protesi articolare da impiantare può essere fatta intraoperatoriamente registrando punti di riferimento ossei e cartilaginei per la costruzione tridimensionale, il decision-making intraoperatorio e la scelta dei piani di resezione ossei.
Si tratta di un sistema chirurgico semiautonomo che posiziona apticamente una guida di resezione, ma non la sega da taglio, aumentando la precisione delle resezioni ossee e valutando l’equilibrio legamentoso dei tessuti molli nella protesi totale del ginocchio.
Navio PFS (Smith e nipote, Memphis, TN), inizialmente FDA approvato dalla FDA nel 2012 per protesi parziali di ginocchio e più tardi anche per le protesi totali diginocchio, è un dispositivo senza immagini che utilizza una piattaforma aperta con uno strumento collegato che permette il taglio delle superfici ossee del ginocchio a mano libera. L’interattivo strumento di taglio portatile, controllato dal chirurgo, ha una fresa metallica che si estende e si ritrae in modo che venga rimosso solo l’osso pianificato. Come sistema semiautonomo, il chirurgo controlla i movimenti dell’utensile, con la sicurezza della retrazione della punta metallica quando ci si avvicina al volume di rimozione ossea non desiderato.
Navio utilizza la navigazione ottica con un sistema imageless per fornire immagini 3D, creando così un virtuale modello del ginocchio osseo. Il sistema continuamente tiene traccia della posizione del ginocchio del paziente e della fresa di taglio, in modo che la posizione degli arti ed il grado di flessione del ginocchio può essere modificato costantemente.
Tuttavia, Navio non si affida al feedback aptico ma piuttosto, fornisce un controllo protettivo contro l’involontaria asportazione ossea.
Nel 1992, il sistema ROBODOC (inizialmente da Curexo Technology, Fremont,CA) è stato il primo robot utilizzato clinicamente in chirurgia ortopedica. ROBODOC è una piattaforma robotica autonoma, attiva e basata sull’acquisizione di immagini preoperatorie.
Una volta che il sistema è stato posizionato e fissato al paziente, il robot sarebbe automaticamente capace di fresare una cavità per l’alloggiamento dello stelo femorale.
Il sistema ROBODOC richiede molto tempo per la pianificazione, la registrazione e la fresatura e l’aumento del tempo chirurgico è un noto potenziale fattore di rischio per l’infezione protesica articolare. L’attuale applicazione dell’anca è limitato alla sola preparazione femorale. Non sono disponibili con questa piattaforma valutazione della cinematica articolare.
La guida di taglio robotizzata iBlock (Omnilife Scienza, East Taunton, MA), precedentemente noto come Praxiteles, è stato approvato dalla FDA nel 2010 per resezioni ossee nelle protesi totali d’anca. È una guida di taglio motorizzata, senza immagini, che si posiziona secondo il planning eseguito dal chirurgo per resezioni femorali utilizzando però una sega oscillante standard.
I-Block è accoppiato con il Nanoblock, un blocco regolabile di resezione utilizzato per la tibia nelle protesi di ginocchio. La stazione di computer Omnibioticcrea un modello digitale 3D intraoperatorio unico del paziente consentendo la pianificazione del posizionamento dell’impianto.
RICHIEDI
UNA VISITA